

| D415 D435 D435i D455 | 下载PDF |
目录
- 引言 1.1 本文档的目的与范围 1.2 文档结构
- 概述 2.1 术语定义 2.2 集成流程所需工具 2.3 配置注意事项 2.4 相机集成
- 保持相机长期最佳性能 3.1 相机性能 3.2 校准类型 3.3 各类校准的适用场景 3.4 自动校准 3.4.1 On-Chip校准 3.4.2 Tare校准 3.5 动态校准 3.6 OEM校准 3.6.1 启动OEM校准工具 3.6.2 开始流程 3.6.3 从两个视角采集图像 3.6.4 运行校准算法 3.7 深度质量工具(DQT)
- 结论
图表
- 图2-1. 相机 USB连接示意图
- 图2-2. REALSENSE深度与RGB信息流查看器
- 图 2-3. RealSense On-Chip校准查看器
- 图2-4. 健康检查编号
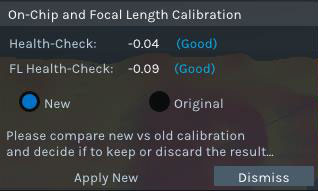
- 图3-1. RealSense On-Chip校准查看器
- 图3-2. 健康检查编号
- 图3-3. TARE校准
- 图3-4. TARE校准真值
- 图3-5. 动态校准目标
- 图3-6. 动态校准
- 图3-7. 动态校准成功
- 图3-8. OEM校准图标
- 图3-9. OEM校准RealSense™设备详情
- 图3-10. OEM校准流程启动
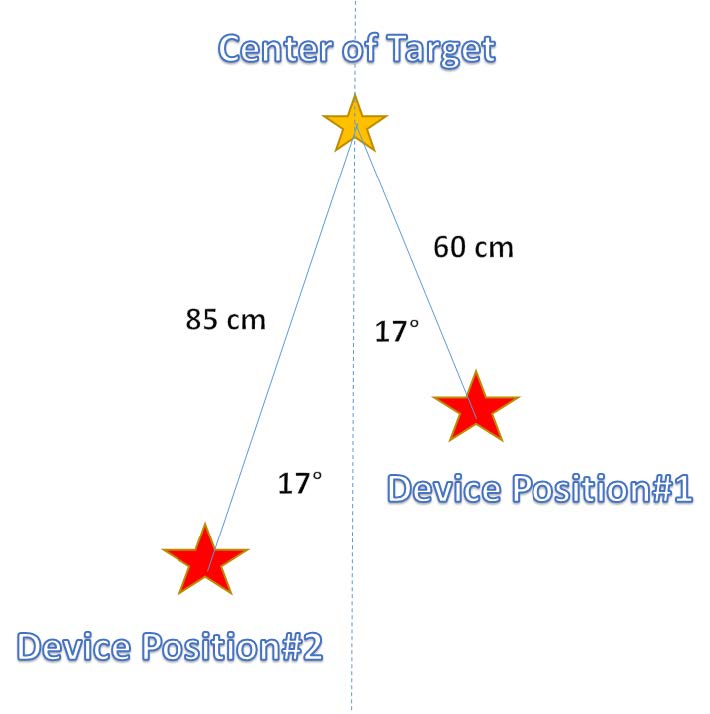
- 图3-11. 预定义位置
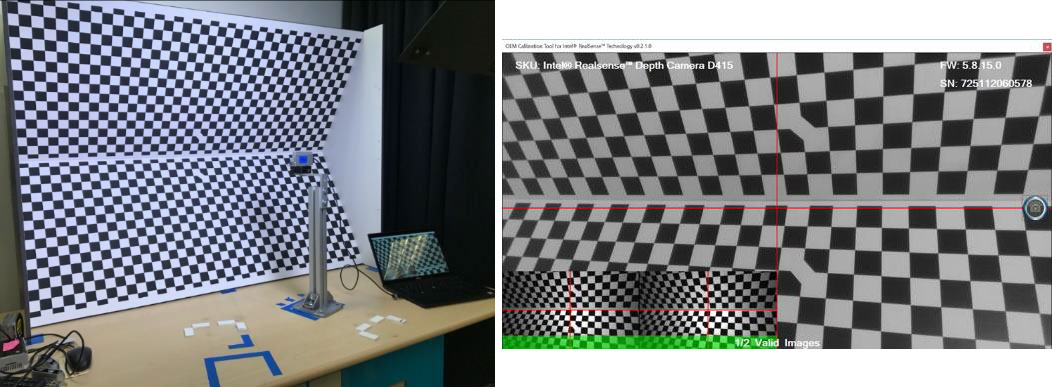
- 图3-12. 标记位置视角#1(近端位置#1)
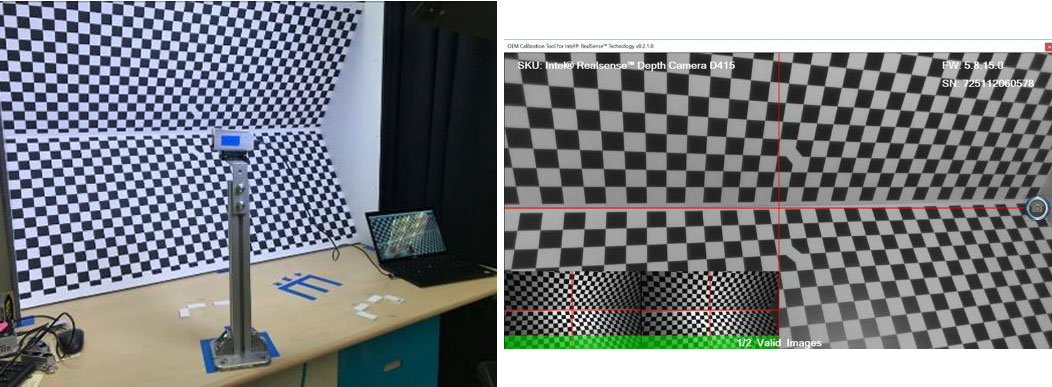
- 图3-13. 标记位置视角#2(远端位置#2)
- 图3-14. 校准算法运行窗口与更新
- 图3-15. OEM校准成功或失败
- 图3-16. 深度质量工具
- 图3-17. 深度质量工具流程
表格
- 表格 2-1. 术语列表
- 表格 2-2. 集成流程工具列表
- 表格 2-3. 集成注意事项
- 表格 3-1. 校准类型
- 表格 3-2. 健康评分含义
- 表格 3-3. ON-CHIP 校准健康检查结果及后续步骤
- 表格 3-4. OEM校准位置详情
修订记录
| 修订编号 | 说明(初始文档流程) | 修订日期 |
|---|---|---|
| 001 | 首次发布 | 2021年 2 月 |
| 002 | 更新零点校准 | 2021年 3 月 |
1. 引言
1.1 本文档的目的与范围
RealSense™ 相机在出厂时均满足所有数据手册规格。由于运输、搬运或恶劣环境的影响,深度精度质量可能会受到影响。本文档作为 RealSense™立体深度相机的参考指南,以确保良好的开箱即用(OOB)体验,并在整个生命周期内保持最优性能。本文档参考了其他资料,但会在其指导中涵盖关键步骤。 本文件不涉及深度或校准细节的深入讨论。此外,模块不在本文件的讨论范围内,但会对其进行说明,以明确界定本文件的范围1.2 文档结构
本文件包含五个主要部分:定义、工具、开箱、集成和后续注意事项:- 定义 – 术语概述。
- 工具 – 可利用本文件信息的工具和站点列表。
- 开箱步骤 – 深度相机开箱时的步骤和注意事项。
- 相机健康状态验证 – 如何判断相机是否正常工作。
- 相机性能优化选项 – 安装或集成深度产品后的步骤和注意事项。
2. 概述
2.1 定义
表 2-1. 术语列表
| 术语 | 定义 | 说明/获取方式 |
|---|---|---|
| 光学模组 | 立体深度视觉模组(无计算引擎或外壳)。
|
可通过: https://store.realsenseai.com/ 购买,或联系 RealSense™ 销售代表。 |
| ASIC卡 | 与模块配对以激活计算机视觉处理的深度计算子系统。
|
可通过: https://store.intelrealsen 购买或联系 RealSense™ 销售代表。 |
| 相机 | 在类似外设的外壳中集成模块和 ASIC 卡的设备
|
可通过: https://store.realsenseai.com/ 购买,或联系 RealSense™ 销售代表。 |
| 深度质量检测工具(DQT) | 用于测量深度相机质量的软件工具。 | https://www.intelrealsense.com/sdk-2/ |
| 校准 | 使 RealSense™模块或相机达到预期表现的方法。 | 本文件将讨论三种校准流程。 |


2.2 集成流程所需工具
表2-2. 集成流程工具列表
| 工具 | 获取地址 | 注意事项 |
|---|---|---|
| RealSense™ SDK | https://www.intelrealsense.com/sdk-2/ | |
| RealSense™ 自动校准 | https://www.intelrealsense.com/self-calibration-for-depth-cameras/ | 该工具位于我们的 SDK 中。此链接指向自校准白皮书。 |
| RealSense™ 动态校准 | https://dev.realsenseai.com/docs/calibration | |
| RealSense™ OEM 校准 | Access comes with a target. V shape OEM target: https://store.realsenseai.com/buy-intel-realsense-d400-cameras-calibration-target.html | 强烈建议在模块或相机集成后使用。该工具面向工厂客户,但任何用户均可受益。 |
| 安装与集成指南 | https://dev.realsenseai.com/docs/intel-realsense-d400-series-product-family-datasheet | 该指南位于数据手册第7章。 |
2.3 集成注意事项
表2-3. 集成注意事项
| 注意事项 | 相机 | 模块 |
|---|---|---|
| 集成要求 | 仅需安装 | 需完成安装、布线、散热和外壳封装。 |
| 是否需要自动校准 | 否。预期开箱即用。 | 是。集成后需校准 |
2.4 相机集成
RealSense™D400 系列相机是一款即插即用的 USB 3.1 高质量立体深度相机,同时支持 USB 2.0。只需参考数据手册中的安装指南并获取 SDK 访问权限,即可启用深度流功能。 ® RealSense™ SDK 2.0 是一个适用于 ® RealSense™ 深度相机的跨平台库。它是一个开源 SDK,可在 https://www.intelrealsense.com/sdk-2/获取。2.4.1 相机到货质检注意事项
- 将相机连接到主机系统。这需要用到图 2-1 中的所有组件。注意:如果主机配备 USB-C 端口,使用 USB-C 转 USB-C 线缆亦可。

- 要激活相机,请使用 ® RealSense™ SDK。SDK 可在以下链接获取https://www.intelrealsense.com/sdk-2/.
- 下载并安装 SDK 后,您的 Windows® 10 系统上将安装两个工具:RealSense™ 查看器和 RealSense™ 相机深度质量工具。
- 启动查看器(图标如下),并启用您的立体模组。该模组默认处于关闭状态。尽管本篇的重点在于深度功能,您也可以启用 RGB 相机。
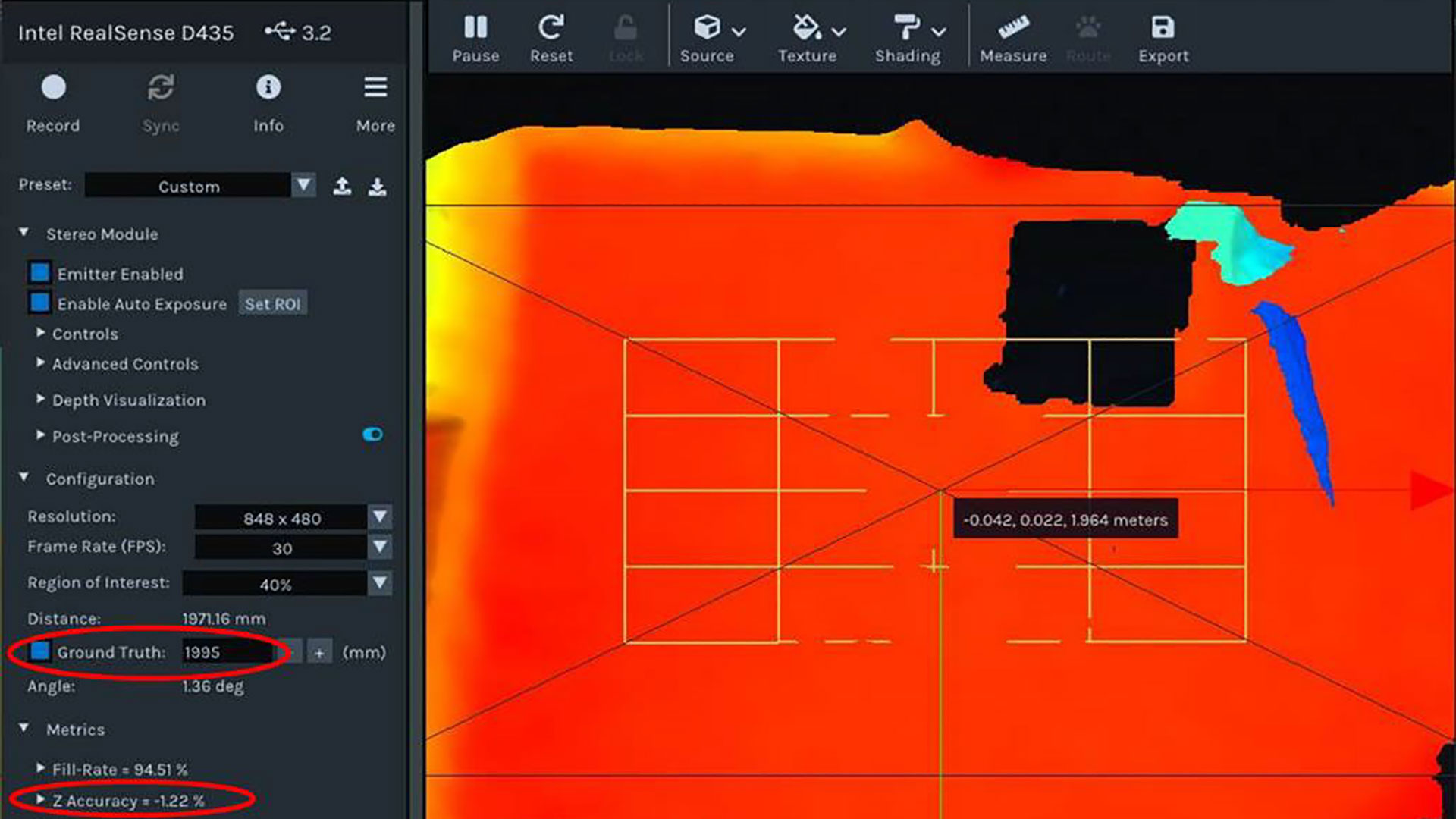
- 启用立体相机后,控件右侧应会出现一幅色彩丰富的深度图。蓝色代表物体“靠近” RealSense™ 相机,红色则代表物体远离。此为默认配色方案。

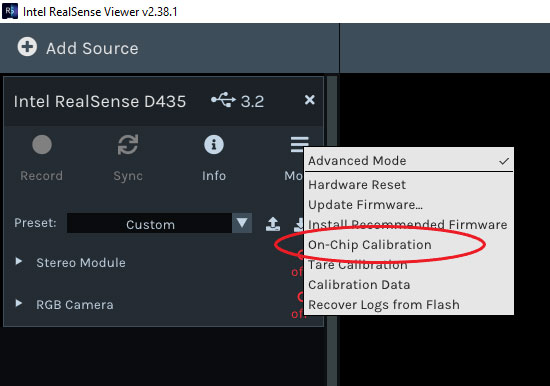
- 接下来,我们建议您验证质量。RealSense™ 提供了一个名为“自动校准”的本地运行工具,它直接在 RealSense™ 设备上运行。在查看器中,它被称为“On-Chip校准”。此校准方法不仅能提升相机的深度质量,还能提供相机当前健康水平的信息。我们建议您运行此工具并确认相机健康状况良好。该工具位于查看器的“更多”选项部分。
- 运行片上校准后,您将获得一个“健康状态检查”数值。后续步骤请参见表 3-3:On-Chip校准健康检查结果后续步骤。
3. 保持相机长期最佳性能
3.1 相机性能
所有 RealSense 相机传感器模组在出厂时均设计得极为坚固,并封装于激光熔接钢制外壳内,使得在整个生命周期内保持校准状态与性能。然而,长期暴露于极端温度循环、过度冲击和振动等情况可能导致性能退化。无论原因如何,RealSense 都提供了一套工具,可将相机重新校准至原始出厂状态,从而在整个生命周期内保持最佳性能。这些工具包括 “自动校准”“动态校准” 和 “OEM 校准”。3.2 校准类型
为使 © RealSense™ 相机保持最佳性能,© RealSense™ 提供三种校准类型,即:自动校准、动态校准和OEM校准。对于模组集成和工厂环境,我们强烈建议购买OEM校准目标并学习使用其配套工具。请联系销售与支持团队以获取访问权限。表 3-1 列出了选择校准类型时的考量因素。表 3-1. 校准类型
| 特性 | 自动校准 | 动态校准 | OEM 校准 |
|---|---|---|---|
| 校准执行引擎 | ® RealSense™D4 视觉处理器 | 外部 PC/SOC | 外部 PC/SOC |
| 参考目标 | On-Chip 校准 – 无需 焦距校准 – 无需 皮重校准 – 可选: 使用基准真值或 目标 | 打印的A4 目标 目标或智能手机(Google或Apple)目标(可在线下载) | V形 OEM 目标: https://store.realsenseai.com/buy-intel-realsense-d400-cameras-calibration-target.html |
| 典型完成时间 | 少于30秒 | 40秒(仅深度) 80秒 (深度 + RGB) – 含10-20秒设备启动时间 | 30秒 – 含10秒设备启动时间 |
| 校准参数 | 内参或外参 | 仅外参,但可在较小程度上覆盖部分内参偏移 | 内参与外参 |
| 校准子系统 | 仅深度 | 深度与RGB | 深度与RGB |
3.3 各类校准的适用场景
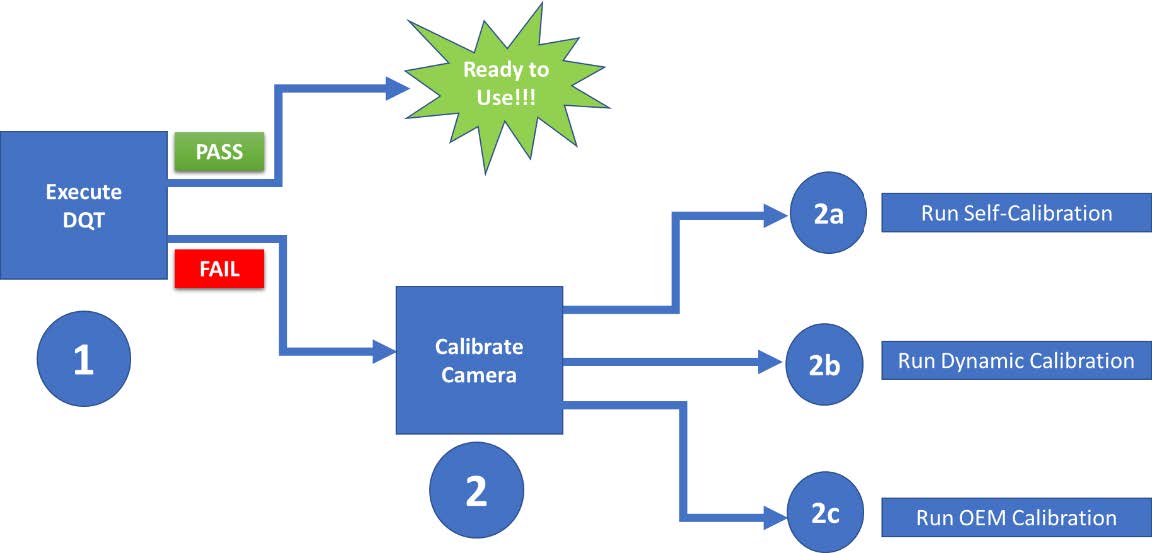
自动校准是对用户而言最便捷、最易操作的校准方式。可在开箱时用于到货质量验证,或在相机现场安装到设备后使用。该校准在相机内置的 VPU 芯片中运行,仅校准深度相机。 动态校准可在实验室或现场执行。需要 A4 打印纸目标板或智能手机目标板,可同时校准深度相机和 RGB 相机。 OEM 校准是 RealSense™立体相机最可靠的校准方法。需要大型 V 型校准目标板,适用于工厂环境或实验室。如果您购买 RealSense 相机模块和 ASIC 卡并自行构建相机外壳,强烈建议使用该校准。它可修正因将模块安装到新外壳中引入的各类畸变。3.4 自动校准
自动校准包含两个部分,即On-Chip校准和皮重校准。 On-Chip校准旨在最大限度地降低噪声,而零点校准则用于提高深度精度。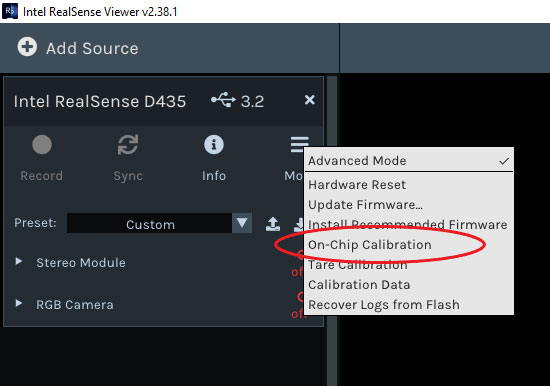
表3-2. 健康评分含义
| 健康评分(绝对值) | FL Health Score (ABS) | Score Meaning |
|---|---|---|
| 0<HC<0.25 | 0<HC<0.15 | Pass |
| 0.25<HC<0.75 | 0.15<HC<0.75 | Help |
| 0.75<HC | 0.75<HC | Fail |
3.4.1 On-Chip校准
表3-3. 校准健康检查结果及后续步骤
| 健康检查值(绝对值) | 焦距健康检查值 (绝对值) | 后续步骤 | 说明 |
|---|---|---|---|
| 小于等于0.25 | 小于等于0.15 | 无需操作 | 可以接受变更,但非必需。 |
| 大于0.25且小于0.75 | 大于0.15且小于0.75 | 在自动校准中接受变更。 | 再次运行自动校准,并验证健康检查的绝对值。 |
| 大于等于0.75 | 大于等于0.75 | 使用动态校准或OEM校准重新校准相机。 | 注:动态校准或OEM校准均有助于改善相机性能,但OEM校准最为稳健,所需设备也最多。 |
3.4.2
皮重校准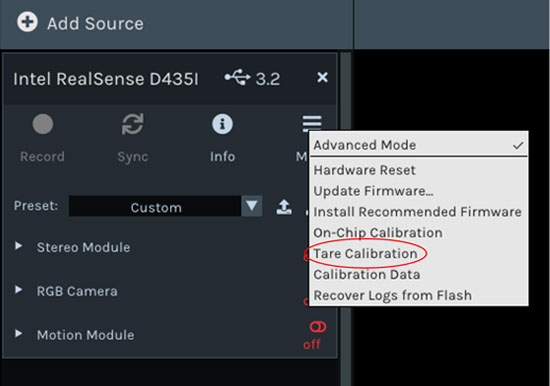

3.5 动态校准
若自校准无法解决相机画质问题,动态校准是一个理想的备选方案。动态校准工具可在快速入门指南的同一站点获取:https://dev.realsenseai.com/docs/d400-dynamic-calibration-quick-start-guide。它位于页面左侧工具列表中。由于动态校准功能全面,建议使用校准目标。也有无目标的解决方案,但仍建议使用目标。本文档默认使用校准目标。- 选择校准目标。目标可打印或通过手机呈现。动态校准快速入门指南的附录 C 可辅助选择目标。
- 目标必须满足非常具体的标准才能有效。目前纸质目标需打印在 8.5×11 英寸的纸上,部分特定手机也可作为目标。工具的当前版本会明确限制条件。
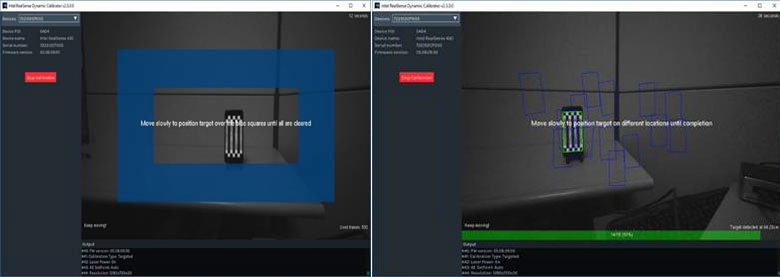
- 目标需放置在 600-850 毫米的距离范围内,且条纹需垂直摆放。示例布局如下。

- 连接设备并开始校准。
- 校准的第一阶段是校正,在此阶段左右图像会被校正,为设备修复比例误差做准备。参见图 3-6。
- 执行 “比例阶段(Scale Phase)”,在此阶段需按照应用程序的引导,将相机移动到特定位置以解决比例误差。之后是 RGB 阶段。
- 本文重点在深度,因此 RGB 阶段未做介绍,但其功能与深度校准非常相似。
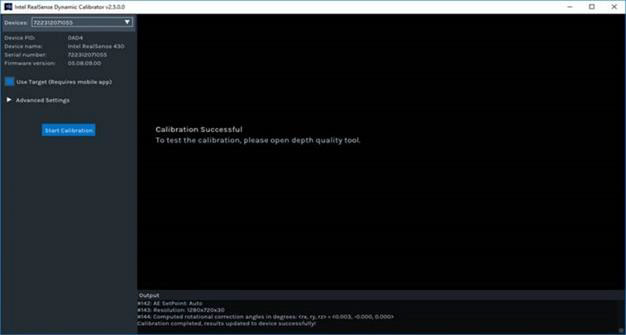
- 尽管系统会显示”校准成功”消息,但我们建议再次运行 DQT 以验证相机功能是否正常。报告相机功能符合规格要求,则相机即可开始使用。
- 如果 DQT 结果仍不理想,则建议进行 OEM 校准。请参阅第 3.6 节了解 OEM 校准流程。这是我们最强大的校准工具,甚至可以修复严重失真的相机。如果您尚无法使用 OEM 校准工具,请联系我们的支持团队:https://www.intelrealsense.com/support/。如果您是 NDA 客户,请使用您的 Zendesk 支持门户帐户。
3.6 OEM校准流程
3.6.1 启动OEM校准工具
在桌面上找到”OEM Calibration Tool”应用程序图标。此应用在您购买校准靶标后即可使用。校准靶标的购买链接为: https://store.realsenseai.com/buy-intel-realsense-d400-cameras-calibration-target.html. Realsense不单独提供该软件,以确保校准过程清晰无误。
3.6.2 启动流程
双击启动该工具。所有已连接的 RealSense™ D400 系列深度相机设备将显示在下拉组合框中。 列表中会显示每个设备的序列号。如果未列出所有设备,请使用刷新按钮更新列表。 从列表中选择需要校准的目标设备。 设备详情包括其序列号、SKU 和固件版本。 当主机系统连接多台相机时,此信息可确保选中正确的设备。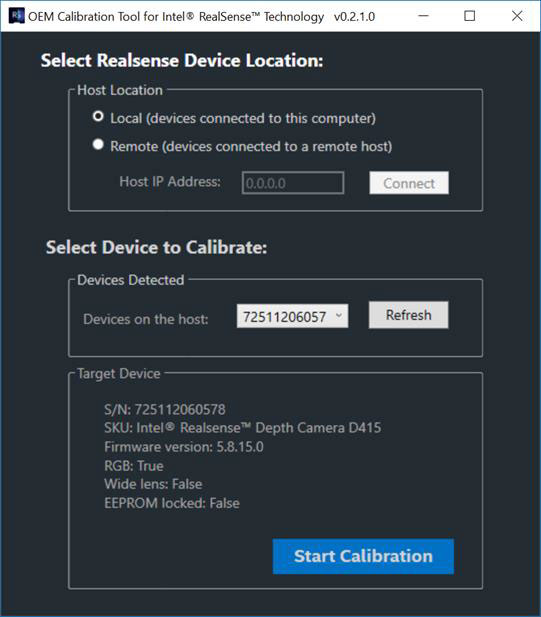
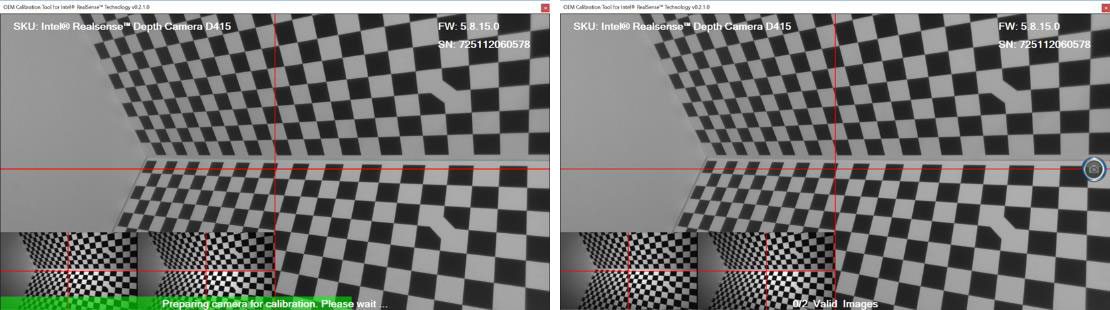
3.6.3 从两个视角捕获图像
OEM校准算法需要从预定义位置的两个视角采集图像表3-4. OEM 校准位置详情
| 位置 | 描述 |
|---|---|
| 位置 #1 | 距离测量: 60厘米 (+/- 1毫米) 角度测量: 17度 (+/- 5度) – 中线右侧 |
| 位置 #2 | 距离测量: 85厘米 (+/- 1毫米) 角度测量: 17度 (+/- 5度) – 中线左侧 |
3.6.4 运行校准算法
成功捕获两个视角的图像后,OEM校准工具将自动开始计算校准算法。此过程通常需要30秒。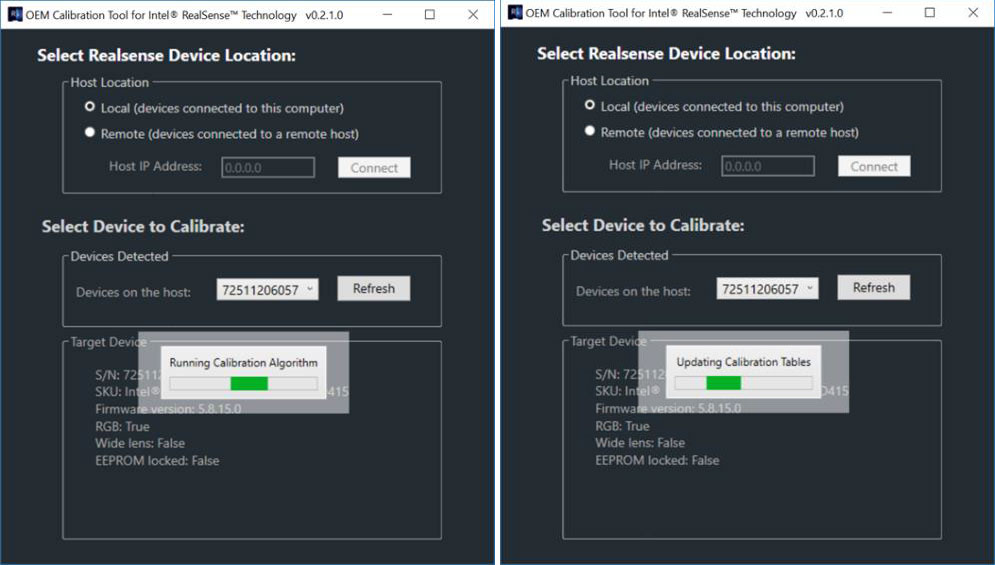

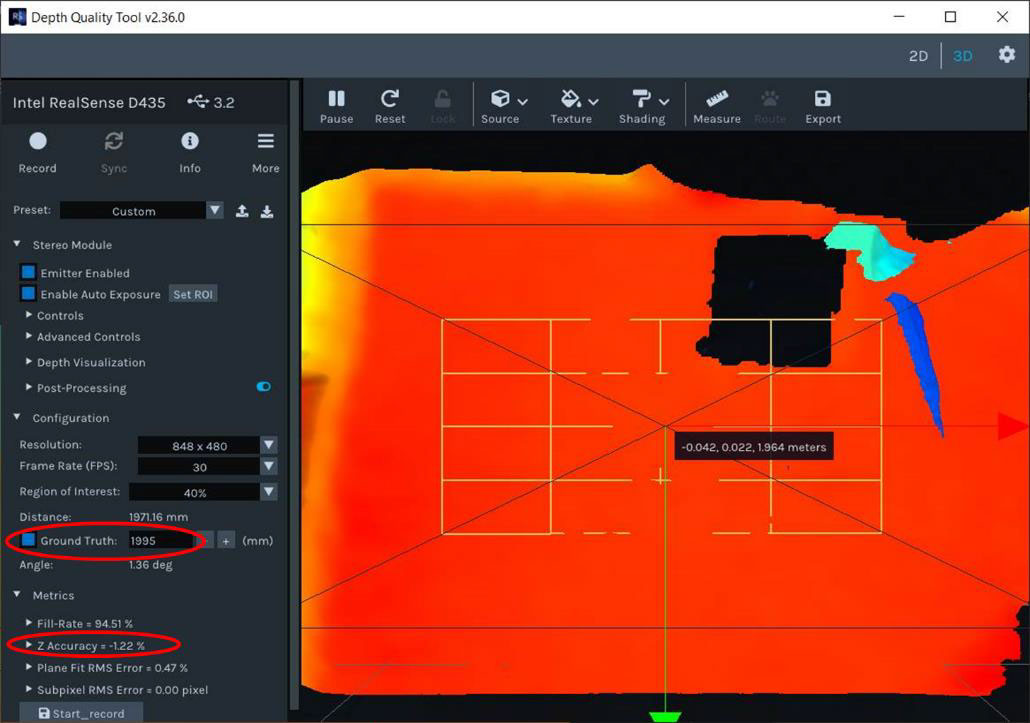
3.7 深度质量工具 (DQT)
此应用程序可用于测试相机的深度质量,包括:Z轴精度、亚像素与Z轴RMS误差(空间噪声)以及填充率。您应能轻松获取并解读多项深度质量指标,或记录保存数据以供离线分析。安装 RealSense™ SDK 后,深度质量工具 (DQT) 会一并安装。启动 DQT(图标如下)。

4. 结论
RealSense™ 深度相机产品性能可靠,可作为解决诸多计算机视觉挑战的优质方案。此外,尽管本文档包含校准技术和产品规格的细节,但并不全面。请务必参考本文档工具部分提及的文档,以及 https://www. realsenseai.com/. 上的丰富信息本文件中的信息与产品相关。本文件未以禁止反言或其他方式授予任何知识产权的明示或默示许可。除产品销售条款和条件中规定的情况外,我们不承担任何责任,Intel 不承担与产品销售和/或使用相关的任何明示或默示担保,包括适用于特定用途、适销性或侵犯任何专利、版权或其他知识产权的责任或担保。 “关键任务应用”是指产品故障可能直接或间接导致人身伤害或死亡的任何应用。如果您购买或使用我们的产品用于任何此类关键任务应用,您应赔偿并使RealSense™ 及其子公司、分包商和关联公司,以及各自的董事、高级职员和雇员免受 我们可能在任何时候更改规格和产品描述,恕不另行通知。设计人员不得依赖任何标记为“保留”或“未定义”的功能或说明的缺失或特性。我们保留在未来定义这些术语的权利,并且对因未来更改而产生的冲突或不兼容性不承担任何责任。此处的信息可能会随时更改,恕不另行通知。请勿根据此信息完成设计。 本文档中描述的产品可能包含称为勘误表的设计缺陷或错误,可能导致产品与已发布的规格有所偏差。当前已确认的勘误表可应要求提供。 在下达产品订单前,请联系当地销售办事处或经销商以获取最新规格。 可通过拨打1-800-548-4725,或访问: http://www.intel.com/design/literature.html。获取本文件或其他文献中引用的带有订单号的文件副本。 文中出现的代号为 RealSense™ 内部用于标识处于开发阶段且尚未公开发布的产品。RealSense™ 未授权客户、被许可人及其他第三方在任何产品或服务的广告、推广或营销中使用这些代号,用户擅自使用我们内部代号需自行承担全部风险。